Time-of-Flight Confidence
Automatically Assigning Confidence to Time-of-Flight Data
A 2010 VEIV EngD Group Project by Malcolm Reynolds, Jozef Dobos and Leto Peel
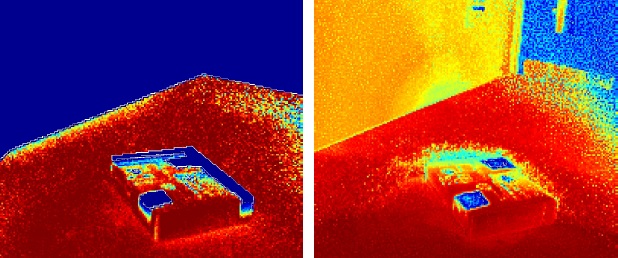
Time-of-Flight (ToF) cameras provide high framerate depth measurements within a limited range. However these readings can be extremely noisy, and display unusual phenomena in certain types of scenes such as edges or materials with low reflectivities. The magnitude of these errors is much larger than in similar technologies such as laser scanners. The CamCube from PMD provides an amplitude value for each pixel (and therefore each 3D point), which can be used as a measure of confidence. In this paper, we show some deficiencies of using this as a measure of pixel reliability and propose an improved per-pixel confidence assignment based on a Random Forest classifier.
The results of our pipeline can be used in a variety of processing pipelines, some of which we demonstrate. Throughout several experiments with a PMD[vision]R CamCube 2.0 camera we show that our confidence measure offers superior results to classical amplitude filtering approaches and that it has the potential to be incorporated into a real-time hand-held system without the need for additional inertial sensors or high-precision robotic arms as done previously. At the same time, it improves the reconstruction accuracy and removes the need for point cloud smoothing and median filtering.